

Special Articles on 5G Evolution & 6G (2)—Initiatives toward Implementation and Use Cases—
NTT DOCOMO Initiatives toward Cooperative Automated Driving Using C-V2X
Cooperative Automated Driving C-V2X SIP-adus
Tomoki Maruko†, Yusuke Jimbo, Tsunetaro Sato, Hiroshi Kawatsu, Toshiyuki Makino and Tomohiro Tokuyasu
6G Network Innovation Department
Presently of R&D Strategy Department†
Abstract
Cooperative automated driving is expected to help build a safer and more comfortable car society through advanced automated driving achieved by using communications to obtain information difficult to detect by onboard sensors. The Automated Driving for Universal Services of the Cross-ministerial Strategic Innovation Promotion Program (SIP-adus) of the Cabinet Office, Government of Japan has pointed out 25 use cases for cooperative automated driving, and accelerated studies toward their implementation in society is desired. Against this background, NTT DOCOMO is promoting studies on C-V2X that uses LTE/5G communications technology. This article touches upon external trends including the content of SIP-adus studies and describes NTT DOCOMO initiatives such as C-V2X field experiments.
01. Introduction
-
There are high expectations for a safer and more comfortable car society ...
Open

There are high expectations for a safer and more comfortable car society made possible by the appearance of “connected cars” that connect by wireless systems to various types of things such as other cars and infrastructure facilities like traffic signals. For example, it has been suggested that connected cars will reduce traffic accidents through advanced automated driving, ease traffic congestion through optimal route selected based on large quantities of collected vehicle data, create new services based on big data analysis*1, and achieve an enjoyable travel space through diversification of in-vehicle entertainment [1]. A future in which the car is no longer just a means of moving about but a new mobile living space is coming into view.
A major industry-academia-government collaborative project on automated driving toward advanced automated driving using communications is the Automated Driving for Universal Services of the Cross-ministerial Strategic Innovation Promotion Program (SIP-adus) of the Cabinet Office, Government of Japan [2]. The SIP-adus project has conducted studies on cooperative automated driving that complements autonomous self-driving by using communications to obtain, for example, blind-spot information that cannot be detected by onboard sensors. As part of these studies, the project consolidated and organized use cases that have been studied both inside and outside Japan and identified 25 use cases of cooperative automated driving [3] while also conducting studies on the applicability of existing communications systems to those use cases. Results of these studies showed that use cases involving the delivery of information to cars from roadside infrastructure could be achieved by existing communications systems. However, they also showed that use cases requiring speed control while cars are connected to each other would require the introduction of new communications systems and the allocation of frequencies [4].
The Frequency Reorganization Action Plan announced by the Ministry of Internal Affairs and Communications (MIC) states that the 5.9 GHz band of the global Intelligent Transport Systems (ITS)*2 band is promising as a new frequency band from the viewpoint of international cooperation. In this regard, MIC is promoting studies on creating new rules by overseeing technical examination services*3 on the 5.9 GHz band, holding meetings of the Study Group on Next-Generation ITS Communications for Cooperative Automated Driving,” etc. [5][6].
To contribute to the provision and expansion of connected car services, NTT DOCOMO is conducting studies on Cellular-Vehicle to Everything (C-V2X) as a new communications system using Long-Term Evolution (LTE)/5th-Generation mobile communications system (5G) communications technology. Specifically, we are designing a street-level simulator that simulates a real environment to evaluate the availability of C-V2X, and we are also constructing a test environment in the Kashiwanoha area of Kashiwa City, Chiba Prefecture for conducting C-V2X field experiments to expand use cases through partner co-creation.
In this article, we touch upon the content of SIP-adus studies and 5.9-GHz-band frequency trends both inside and outside Japan and describe current NTT DOCOMO initiatives toward cooperative automated driving using C-V2X.
- Big data analysis: The analysis of massive amounts of highly diverse digital data using AI or other means to extract data trends, features, etc.
- ITS: An overall name for transportation systems using communications technology to improve vehicle management, traffic flow or other issues.
- Technical examination services: An MIC initiative involving technical studies to formulate technical criteria toward the early introduction of highly promising technologies that can effectively use radio waves.
-
Phase 2 of SIP-adus completed in FY2022 involved studies on cooperative ...
Open
Phase 2 of SIP-adus completed in FY2022 involved studies on cooperative automated driving with the aim of extending the target of practical application of automated driving from expressways to public roads having a more complex traffic environment [4]. One communications system that is being studied worldwide for cooperative automated driving is C-V2X using the 5.9 GHz band.
2.1 Use Cases of Cooperative Automated Driving
In 2015, Japan was the first in the world to adopt an ITS wireless system using the 700 MHz band with a bandwidth of 9 MHz (hereinafter referred to as “700-MHz-band ITS”) to support safe driving for cars [1]. Internationally, however, the 5.9 GHz band has been allocated as an ITS band, and in the United States, it is assumed that a 30 MHz bandwidth will be used, so the situation with frequency allocation differs between Japan and the rest of the world.
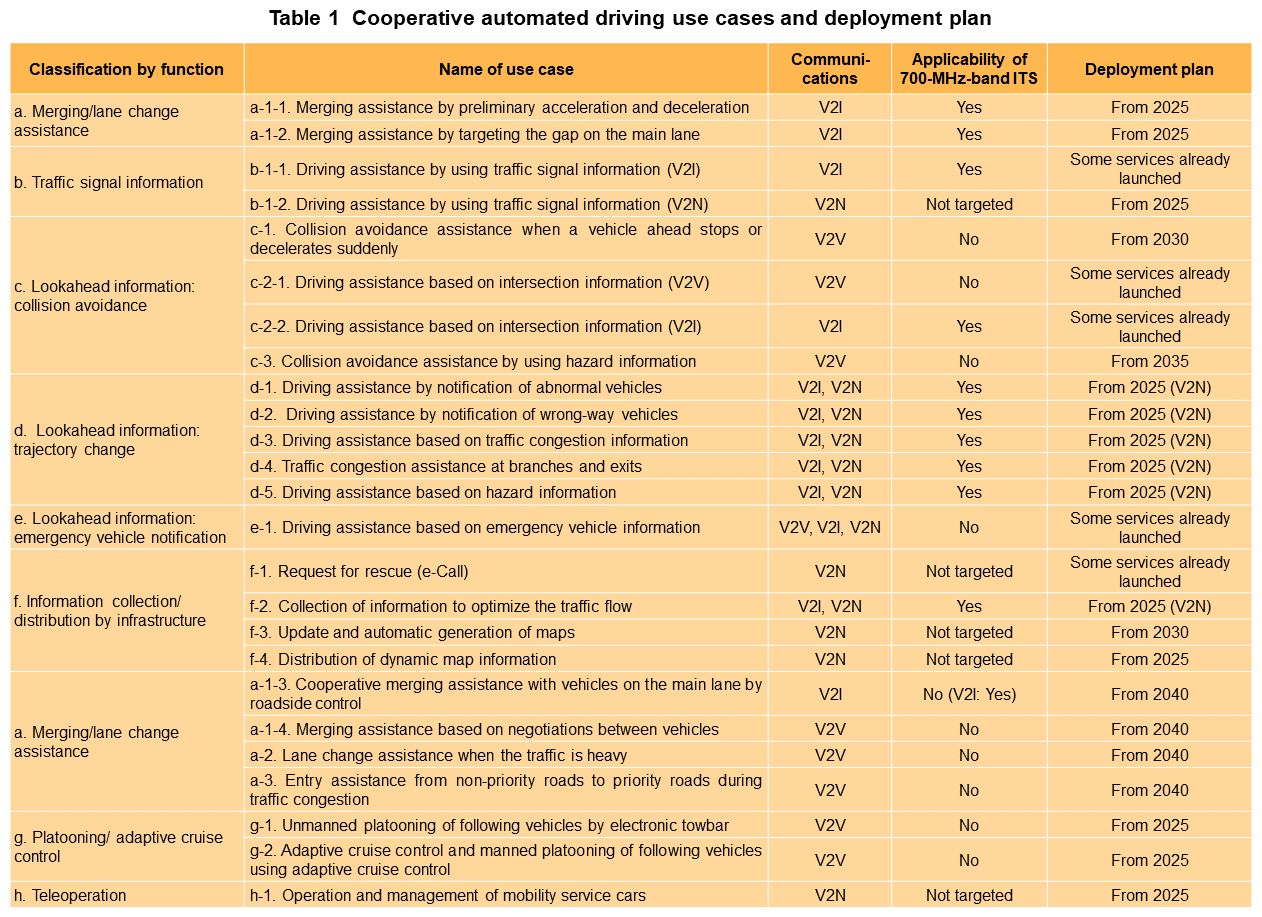
Against this background and with a view to achieving cooperative automated driving of the future using communications, use cases of cooperative automated driving were clarified in Phase 2 of SIP-adus for the purpose of studying appropriate communications systems and necessary frequency resources for Japan [3]. Here, the results of both domestic and international studies were consolidated and organized targeting use cases that cannot be achieved by autonomous self-driving using onboard sensors such as cameras and radar and 25 use cases of cooperative automated driving were presented (Table 1) [3]. It is assumed that Vehicle-to-Vehicle (V2V), Vehicle-to-Infrastructure (V2I), and Vehicle-to-Network (V2N) communications will be used to achieve these use cases.
In addition, communications requirements and protocols for each use case were studied [7] and desktop studies were conducted on the feasibility of using 700-MHz-band ITS—the existing communications system—for 20 V2V and V2I use cases. For use cases requiring speed adjustments while specific cars are connected (use cases a-1-3, a-1-4, a-2, and a-3 in Table 1), it was found that using a broadcast-type communications system like 700-MHz-band ITS is difficult. The conclusion was that a new communications system was needed and that further reorganization of communications requirements was needed for the other use cases in which 700-MHz-band ITS is not applicable.
A roadmap was prepared toward the deployment of use cases based on the above evaluation results. It shows that most of the use cases that can apply 700-MHz-band ITS or use the cellular network will be achieved from 2025 on with a view to early deployment. It also shows that use cases requiring speed adjustments while specific cars are connected will be achieved from 2040 on assuming a penetration rate of 30% for onboard units equipped with the new communications system.
2.2 C-V2X
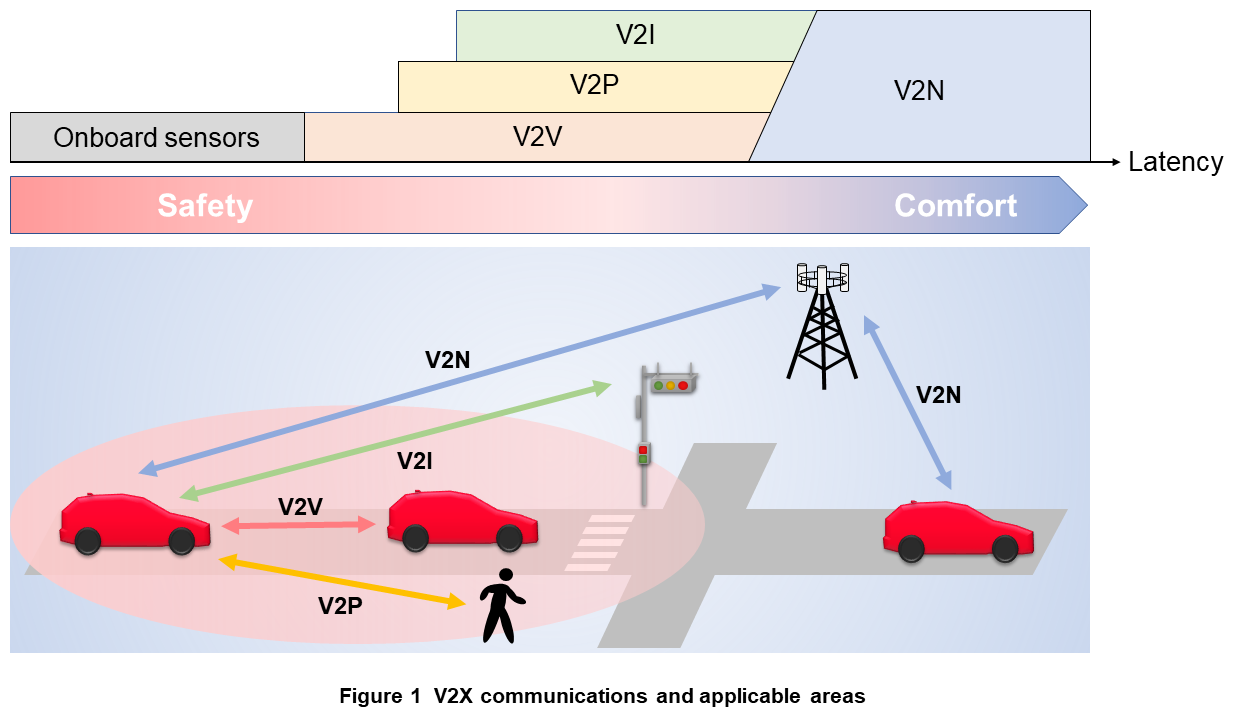
Communications between a car and various types of things is called V2X, which consists, in particular, of V2V, V2I, Vehicle to Pedestrian (V2P), and V2N (Figure 1). V2V, V2I, and V2P assume short-range, low-latency, and direct communications, while V2N assumes wide-area communications via the cellular network. Using an appropriate type of V2X communications for each use case is expected to improve the safety and comfort of automated driving.
One of the V2X communications systems is C-V2X, which has been standardized by the 3rd Generation Partnership Project (3GPP), an international standardization organization focusing on mobile communications systems. In addition to Uplink/Downlink (UL/DL) communications via base stations, C-V2X now includes specifications for direct communications between terminals for V2X (hereinafter referred to as “V2X sidelink”), thereby supporting all V2X communications formats. Discussions at 3GPP are moving forward while exchanging information with organizations such as the 5G Automotive Association (5GAA)*4.
In 2017, specifications for the LTE V2X sidelink based on LTE communications technology were formulated in 3GPP Release 14. The LTE V2X sidelink targets applications related to basic support for safe driving. It is optimized for periodically broadcasting vehicle information such as one's own vehicle's position and speed, and it enables communications even when out of the cellular coverage area of base stations. Then, in 2020, the NR V2X sidelink was specified in Release 16. The NR V2X sidelink is communications technology based on the New Radio (NR) system developed for 5G. It targets more advanced use cases such as platoon driving, sensor information sharing, and conditional/full automated driving. These use cases require high-reliability, low-latency, and large-capacity communications, and to satisfy those requirements, the NR V2X sidelink supports groupcast and unicast modes in addition to broadcast mode. It also supports retransmission control (excluding broadcast mode) based on feedback from decoding results, expansion of the subcarrier*5 interval, and in Multi Input Multi Output (MIMO) transmission*6, 2-stream*7 transmission.
In UL/DL communications for V2N, LTE and NR can be used. Within NR, using 5G-dedicated core network*8 facilities and 5G base stations is driving the commercialization of high-speed 5G Standalone (SA)*9 implementations, which are expected to expand steadily in the future. Moreover, mobile network operators have begun to construct cloud servers within their closed networks and to provide Multi-access Edge Computing (MEC)*10 that can provide secure and low-latency communications. These developments can lead to advanced versions of C-V2X.
2.3 5.9 GHz Frequency Allocation Trends
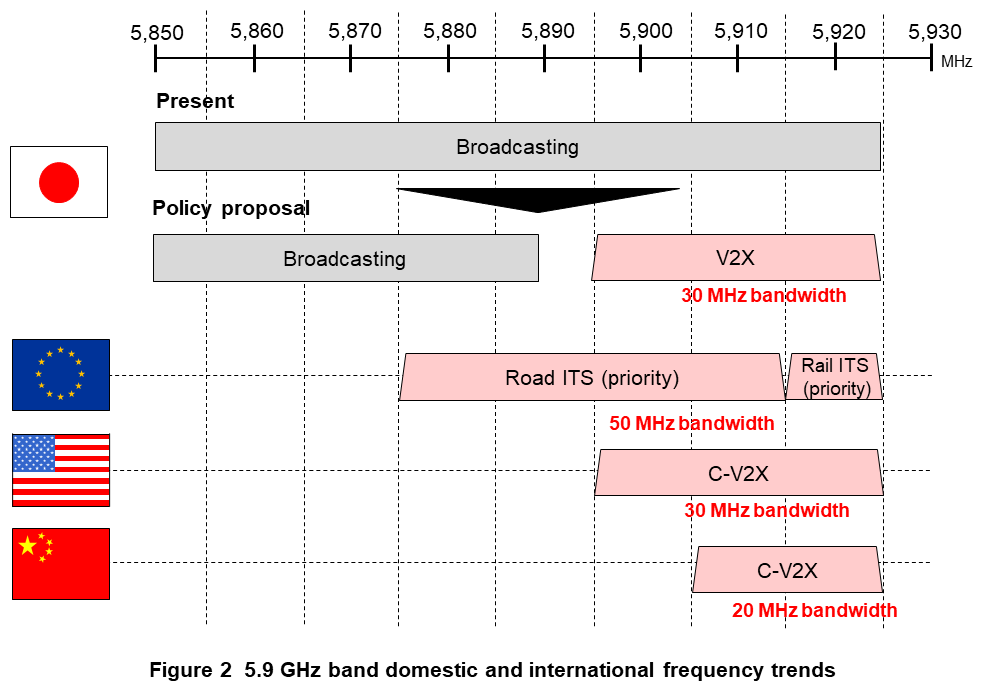
In 2019, Recommendation ITU-R 208 regarding harmonization of frequency bands for ITS applications was agreed upon at the International Telecommunication Union Radiocommunication Sector (ITU-R)*11 World Radiocommunication Conference 2019 (WRC-19)*12. Since then, the introduction of V2X systems in the 5.9 GHz band has begun in earnest in Europe, the United States, and elsewhere throughout the world based on this Recommendation (Figure 2) [6][8].
In Europe, a 50 MHz bandwidth from 5,875 to 5,925 MHz was allocated in 2020 for use in safety-related ITS. However, while the purpose of use was prescribed for each band, no communications system was specified. In the United States, meanwhile, the Federal Communications Commission (FCC)*13 announced in 2020 its intent to change the allocation of a 30 MHz bandwidth from 5,895 to 5,925 MHz within the existing 70 MHz bandwidth (5,855 to 5,925 MHz) for use by a C-V2X system. In China, a 20 MHz bandwidth from 5,905 to 5,925 MHz was allocated in 2018 for C-V2X and field experiments were conducted [9].
In Japan, considering that the 5.9 GHz band has been used up to now for broadcasting, a 9 MHz bandwidth in the 700 MHz band was allocated for an ITS wireless system to support safe driving and a 700 MHz band V2X system was implemented in 2015 [1]. After this, the Frequency Reorganization Action Plan [5] released by MIC in the year following Recommendation ITU-R 208 (2020) stated the intention to perform technical studies toward the introduction of V2X communications in the 5.9 GHz band. Studies on rule creation have been progressing since then.
Technical examination services in 2020 and 2021 geared toward technical studies on the effective use of radio waves included studies on interference between the existing system and the V2X system in the 5.9 GHz band. These studies showed that band sharing would be difficult [10][11]. On the other hand, at the Study Group on Next-Generation ITS Communications for Cooperative Automated Driving, which began in 2023 for the purpose of studying automated driving based on environment/system developments, it was decided to go in the direction of allocating a maximum bandwidth of 30 MHz from 5,895 to 5,925 MHz to V2X based on the results of the above band-sharing study and comments from study group members from the automobile industry, broadcasting industry, etc. (Fig. 2) [6].
NTT DOCOMO has been participating in these technical examination services based on a new system toward the implementation of V2X in the 5.9 GHz band from FY2023 and has been conducting technical studies. We have also submitted a report to the Study Group on Next-Generation ITS Communications for Cooperative Automated Driving” on the results of studying plans for combining V2V/V2I with V2N, which is one item that needs to be addressed, and have contributed to lively discussions on this issue [12].
- 5GAA: An international connected-car investigation organization consisting of car-related companies and Information and Communication Technology (ICT) companies.
- Subcarrier: Each carrier in a multi-carrier modulation system that transmits bits of information in parallel over multiple carriers.
- MIMO transmission: A signal transmission technology that improves communications quality and spectrum efficiency by using multiple transmitter and receiver antennas to spatially multiplex signals.
- Stream: A sequence of data that requires a specific type of identical processing from the network.
- Core network: A network consisting of a telecommunications operator's switching equipment, subscriber information management equipment, etc.
- 5G SA: A 5G service based on the SA model in which dedicated 5G equipment and 5G base stations are used, in contrast to Non-Standalone (NSA) operation that uses 4G equipment.
- MEC: A system that installs servers at locations near users. Standard servers are typically placed on the Internet, but MEC servers are installed within the carrier network to reduce latency. This scheme greatly improves response speeds.
- ITU-R: The sector within the International Telecommunication Union (ITU) in charge of radio communications. Its primary activities are revising the Radio Regulations, creating recommendations, and allocating frequencies.
- WRC-19: A conference that reviews, and if necessary, revises Radio Regulations, the international treaty governing the international radio order including the use of frequency bands, the use of satellite orbits, various regulations concerning the operation of radio stations, and technical standards. It is usually held once every three to four years and attended by concerned organizations such as the administrations of member countries, communications operators, companies, and institutions registered with the ITU.
- FCC: An independent agency of the United States government that regulates communications and radio waves across the United States.
-
3.1 Kashiwa-no-ha C-V2X Test Environment
Open
NTT DOCOMO is setting up a test environment to conduct field experiments of use cases for cooperative automated driving and to expand use cases through co-creation with partner companies all toward the development of a safer and more comfortable car society. This test environment is broadly divided into a test course and a C-V2X test platform.
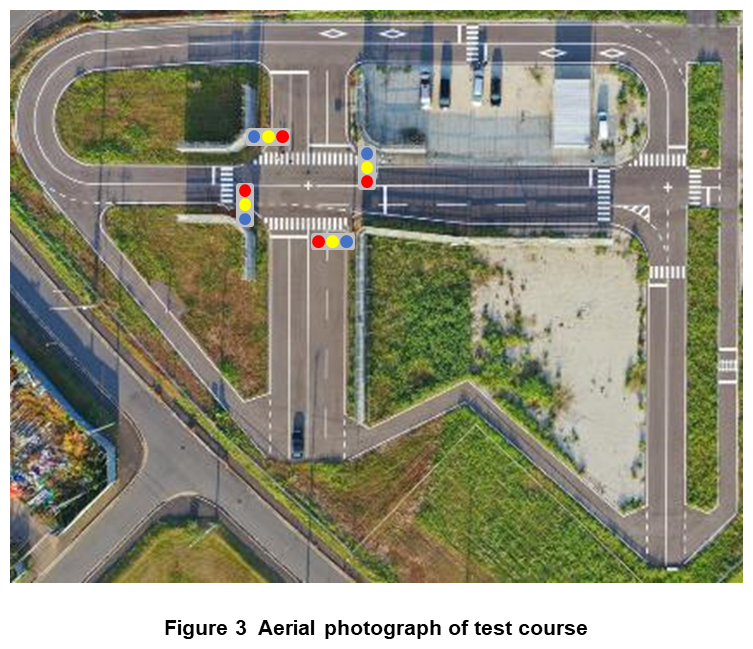
The test course is a test site simulating a simple set of public roads located in the Kashiwa-no-ha area where 5G communications is available (Figure 3). It consists mainly of roads that vehicles can drive on, intersections with traffic signals, and work garages. This environment enables a wide variety of field experiments assuming actual public roads, obstructions, etc. The surrounding area, which is called the Kashiwa-no-ha Smart City*14, is understood to be an area promoting next-generation ITS initiatives and includes, for example, the Kashiwa ITS Promotion Council*15 organized as part of advanced urban development. It is therefore an environment in which field experiments can be easily conducted.
The C-V2X test platform, meanwhile, consists of onboard units that can simultaneously control V2V/V2I and V2N, tablet terminals equipped with dedicated applications, and an ITS server constructed on docomo MEC*16. This platform enables use cases to be set up just by setting simple rules on the ITS server. It also enables the ITS server and applications to be customized or other functions to be added on as needed so that a variety of use cases can be set up with individual partner companies in a unique and secure environment. In addition, the frequencies for direct communications (sidelink) correspond to the 5.9 GHz band, so tests on public roads in the surrounding area can also be conducted in addition to the test course.
At present, NTT DOCOMO is working on a broad range of C-V2X-based initiatives in this test environment from radio-wave propagation measurements for a moving car to use-case field tests and showcase events. Going forward, we aim to improve the test environment and stimulate co-creation with diverse partner companies to expand use cases even further.
3.2 Linking Teleoperation with Delivery of Signal/Target Information
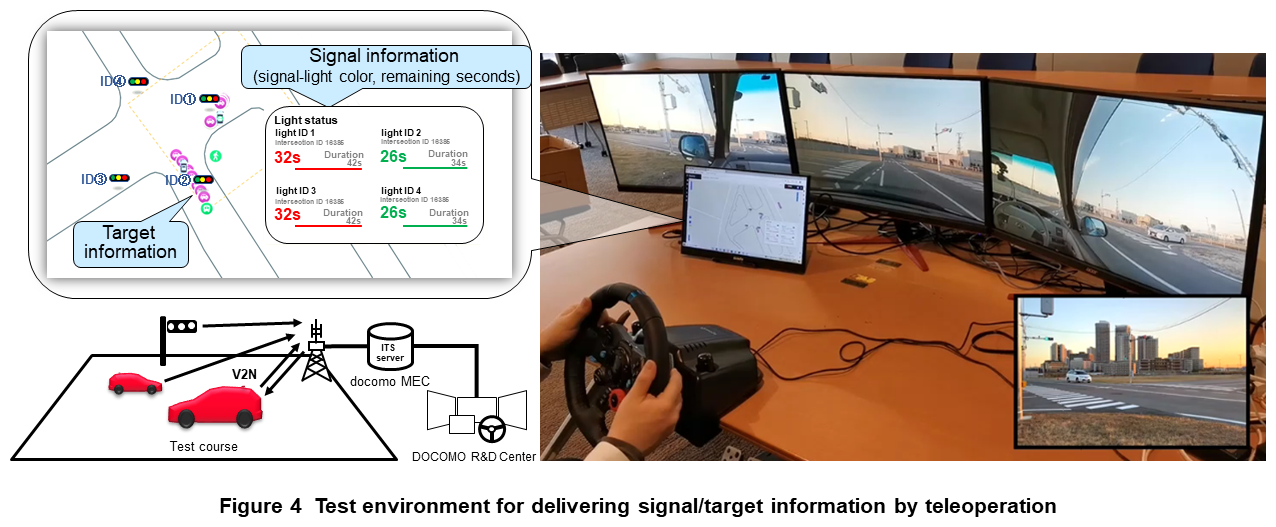
Teleoperation is being studied envisioning cases in which mobile service cars*17 that use cooperative automated driving technology fall into conditions in which autonomous driving is difficult [3]. However, when the remote operator attempts to identify the color of a signal light or recognize pedestrians, vehicles, or other objects through video obtained from onboard cameras, it may be difficult to grasp such peripheral conditions due to environmental factors such as sunlight and the weather.
With an eye to safer teleoperation, we conducted a field experiment between the above test course and DOCOMO R&D Center on the delivery of peripheral target*18 information and intersection signal information as information to be conveyed to the remote operator pertaining to the car targeted for teleoperation. The system used for this experiment consisted of a teleoperation system and a peripheral-conditions delivery system constructed on an ITS server.
The teleoperation system transmits the video captured by onboard cameras on the car targeted for teleoperation to the remote operator via the cellular network and achieves teleoperation by transmitting control information such as steering wheel and accelerator conditions from the remote operator to the teleoperated car. The peripheral-conditions delivery system consolidates intersection signal information (signal-light color, remaining seconds) and target information detected by roadside infrastructure and sensors (Light Detection And Ranging (LiDAR)*19, cameras, etc.) of other nearby vehicles at the ITS server via the cellular network and delivers that information to the remote operator.
Figure 4 shows how teleoperation is performed from the DOCOMO R&D Center for a car running on the test course in this experiment. It can be seen from this figure that the colors of signal lights can be clearly identified with the peripheral-conditions delivery system regardless of the quality of the camera video from the teleoperated car. It can also be seen that this system can deliver the seconds remaining until the signal light changes color, which is information that cannot be obtained by camera video, thereby avoiding sudden braking and enabling smooth driving. In addition, by delivering target information detected by roadside infrastructure and nearby vehicles to the remote operator, this system can also determine blind spots of the teleoperated car. In the above way, this experiment demonstrated the effectiveness of delivering information on peripheral conditions.
Not only teleoperation but autonomous self-driving vehicles too use onboard sensors to identify the color of a signal light and detect targets, so there is concern that the accuracy of such identification and detection could drop due to environmental factors or other problems. In future research, we will examine the effectiveness of information delivery in autonomous self-driving vehicles.
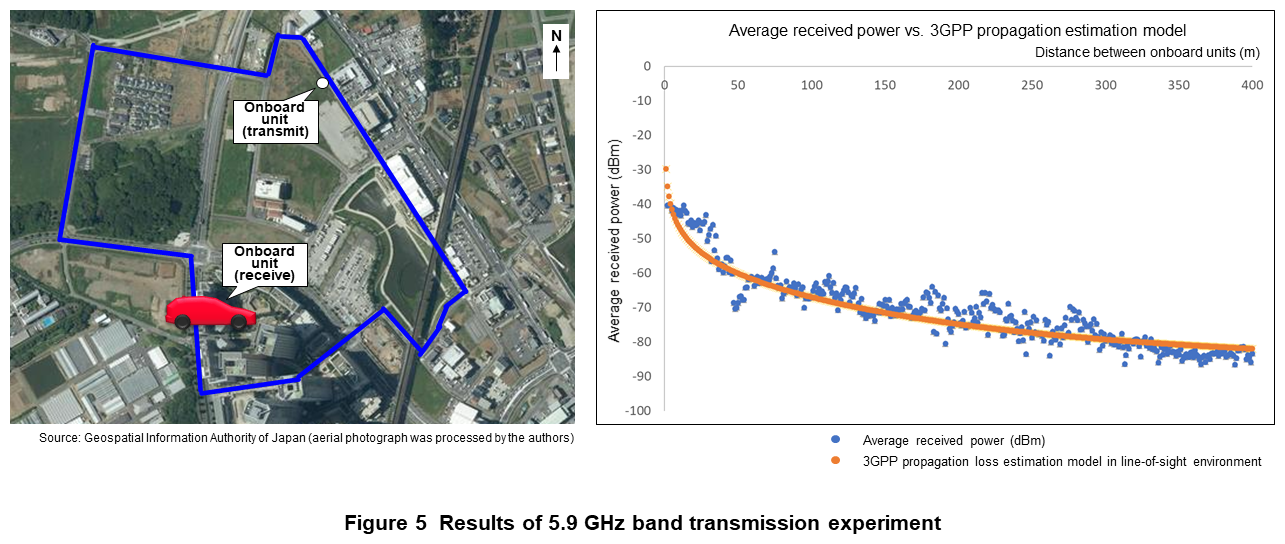
3.3 5.9 GHz Band Transmission Experiment
To determine basic characteristics of C-V2X in an urban setting, we conducted a field experiment to evaluate the propagation performance of V2V in the 5.9 GHz band on the aforementioned test course and in the surrounding area. In this experiment, we fixed a transmission terminal within the test course and measured received power at an onboard units (receive side) on a vehicle traveling along the periphery of the test course.
Figure 5 shows a graph comparing the results of measuring average received power on the circular course of this experiment with the 3GPP propagation loss estimation model for a line-of-sight environment [13] versus the distance between the onboard units. This experiment revealed that transmitted messages could be demodulated for the most part for received power above –95 dBm and that the results for distance versus average received power were nearly equivalent to the 3GPP propagation loss estimation model.
In future research, we plan to evaluate wireless characteristics considering a drop in received power due to obstructions like large vehicles or buildings or an environment in which both the transmit and receive terminals are moving.
3.4 Evaluation of C-V2X in Virtual Space
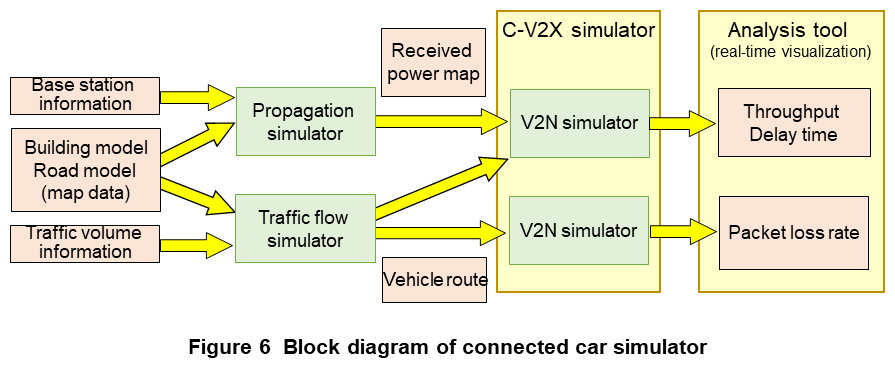
Demonstrating the availability of C-V2X is important for introducing and expanding an industry-wide system and achieving a safer and more comfortable car society. However, the conventional 3GPP evaluation model [13] that has come to be used for evaluating availability is a simple, spot model that does not conform to reality. We therefore developed a connected car simulator that can reproduce streets the same as those in the real world in virtual space and evaluate the communications performance of several hundred vehicles traveling on those streets based on actual traffic flow data.
A block diagram of the connected car simulator is shown in Figure 6. This simulator consists of a propagation simulator, traffic flow simulator, and C-V2X simulator equipped with a V2N simulator and V2V simulator. It reproduces in virtual space a building model and road model extracted from map data.
The propagation simulator calculates the received power between mobile-phone base stations and various points on the roads using the ray-tracing method*20.
The traffic flow simulator reproduces vehicle travel in virtual space according to a vehicle distribution based on congestion statistical data on roads from actual measurements.
The V2N simulator reproduces selection of the connecting mobile base station, handover*21, frequency selection, etc. between base stations and a vehicle at specific time intervals. In terminal data communication, the simulator generates data based on a traffic model while the calculation of latency takes into account network delay in addition to the time needed to complete transmission of the generated data.
The V2V simulator reproduces direct communications between vehicles, but since the position of each vehicle changes from moment to moment, the positional relationship between vehicles is continuously changing. For this reason, the V2V simulator calculates the received power between vehicles using a 3GPP propagation statistical model taking into account blockage caused by buildings and other vehicles situated between the vehicles, etc. In addition, direct communications includes periodic transmission of packets while avoiding radio wave interference in an autonomous distributed manner. Analysis of factors relevant to packet loss*22 is also performed.
The V2N and V2V simulators make it possible to simulate C-V2X packet communications and to calculate communications performance such as throughput, delay time, and packet loss rate.
We have also developed an analysis tool for visualizing evaluation results in real time and analyzing communications performance on each road. As one example, the availability of cooperative automated driving use cases in an urban setting is being evaluated [14].
Going forward, we expect this connected car simulator to be used not only for evaluating the availability of cooperative automated driving use cases but also for creating and evaluating new use cases of combining V2N and V2V.
- Kashiwa-no-ha Smart City: A vision of next-generation cities centered about the Kashiwa-no-ha area involving collaboration among the public, private, and academic sectors to promote next-generation urban development.
- Kashiwa ITS Promotion Council: An organization founded in 2009 consisting of administrative agencies, private companies, and other institutions with the aim of solving urban issues in the Kashiwa area using advanced ITS technologies. NTT DOCOMO is a regular member (as of 2023).
- docomo MEC: MEC services provided by NTT DOCOMO that make maximum use of 5G features.
- Mobile service cars: Vehicles that provide mobile services to users such as shuttle buses and fixed-route buses.
- Target: Objects targeted for detection by cameras or sensors such as nearby pedestrians and vehicles.
- LiDAR: Remote sensing technology that irradiates objects in the surrounding area with light such as near-infrared light and visible light and measures distance by capturing that reflected light by an optical sensor.
- Ray-tracing method: A technique for analyzing radio propagation characteristics by simulating the emission of multiple rays (light beams) from a transmission point and the reflection and diffraction of each ray against topography and buildings and then synthesizing the rays arriving at a certain reception point.
- Handover: The switching of base stations for connecting a terminal accompanying the movement of that terminal from one coverage area to another.
- Packet loss: The failure of error-free data packets to be delivered to their destination due to the occurrence of information errors, congestion, or other issues.
-
This article touched upon the SIP-adus initiative and ...
Open
This article touched upon the SIP-adus initiative and domestic/international frequency trends in the 5.9 GHz band and described NTT DOCOMO initiatives toward cooperative automated driving using C-V2X including the Kashiwa-no-ha test environment, the field experiments conducted there, and a connected car simulator that simulates a real environment. In future activities, we aim to contribute to the creation of a safer and more comfortable car society and the development of advanced cooperative automated driving by accelerating studies on the new NR V2X communications system and expanding use cases that combine V2V/V2I with V2N. Additionally, with a view to achieving even more advanced cooperative automated driving, we will promote studies on C-V2X compatible with the 6th-Generation mobile communications system (6G).
-
REFERENCES
Open
- [1] MIC, Study Group Focusing on the Realization of a Connected Car Society: “Towards the Realization of a Connected Car Society,” Jul. 2017 (in Japanese).
- [2] Cabinet Office, Government of Japan: “SIP-adus.”
 https://en.sip-adus.go.jp
https://en.sip-adus.go.jp - [3] Task Force on V2X Communication for Cooperative Driving Automation, System Implementation Working Group, SIP-adus: “SIP Use Cases for Cooperative Driving Automation—Activity Report of Task Force on V2X Communication for Cooperative Driving Automation in FY2019—,” Sep. 2020.
https://en.sip-adus.go.jp/rd/rddata/usecase.pdf - [4] SIP-adus: “The SIP Phase 2 of Automated Driving for Universal Services Final Results Report (2018-2022),” Dec. 2022.
https://en.sip-adus.go.jp/file/rd_file/rd-result_all.pdf - [5] MIC: “Frequency Reorganization Action Plan (revised version for FY2020),” Nov. 2020.
https://www.soumu.go.jp/main_sosiki/joho_tsusin/eng/presentation/pdf/20200513Frequency_Reorganization_Action_Plan.pdf - [6] MIC: “Current State of ITS Communications in the Automated Driving Era,” Feb. 2023 (in Japanese).
https://www.soumu.go.jp/main_content/000861967.pdf - [7] ITS Info-communications Forum: “Study Report on Communication Scenarios and Requirements for SIP Use Cases for Cooperative Driving Automation, ITS FORUM RC-017 Ver. 1.0,” Jun. 2022.
https://itsforum.gr.jp/Public/E3Schedule/p40/ITS_FORUM_RC-017eng_v10s.pdf - [8] ITS Info-communications Forum, Cellular System TG: “Issue Survey Report, Advanced ITS and Automated Driving Using Cellular Communications Technologies,” Jan. 2021.
https://itsforum.gr.jp/Public/E3Schedule/p35/Cellular_system_E202101.pdf - [9] 5GAA: “C-V2X Pilot and Demonstration Areas in China,” Oct. 2022.
https://5gaa.org/content/uploads/2022/10/C-V2X-Pilot-and-Demonstration-Areas-in-China.pdf - [10] MIC: “Technical Study on 5.9 GHz Band V2X Communications Systems,” 2020 (in Japanese).
https://www.tele.soumu.go.jp/resource/j/fees/purpose/pdf/R2_TE07.pdf - [11] MIC: “Technical Study on 5.9 GHz Band V2X Communications Systems,” 2021 (in Japanese).
https://www.tele.soumu.go.jp/resource/j/fees/purpose/pdf/R3_TE03.pdf - [12] MIC, Study Group on Next-Generation ITS Communications for Cooperative Automated Driving, NTT DOCOMO: “NTT DOCOMO Initiatives toward V2N and V2X,” Mar. 2023 (in Japanese).
https://www.soumu.go.jp/main_content/000869189.pdf - [13] 3GPP TS37.885 V15.3.0: “Study on evaluation methodology of new Vehicle-to-Everything (V2X) use cases for LTE and NR,” Jun. 2019.
- [14] T. Makino, T. Tokuyasu, T. Maruko and T. Ihara: “Communications Performance Evaluation of Lane Changes Using V2V,” IEICE General Conference, A-13-11, p. 116, Mar. 2023 (in Japanese).

